近期,电智学院AiNET团队刘新宇博士和周清峰教授在运动感知领域中探索研究取得阶段性科研成果。相关论文成果发表在校定T类二级权威学术期刊IEEE Transactions on Industrial Electronics(中科院1区)与B类期刊IEEE Signal Processing Letters(中科院2区)。
运动感知技术已被广泛应用于军事、农业、工业以及日常生活等各个领域,该技术也是数字孪生与VR/AR等新兴应用的核心技术之一。不同于传统应用,新兴应用覆盖场景更加多元,对运动感知系统的精度、能耗、可扩展性以及鲁棒性等性能均提出了更高的要求。在诸多类别的运动感知系统中,基于惯性传感器(陀螺仪与加速度计)的感知系统具有适应面广、分辨率高、感知频率快且功耗较低等特点,因此其被广泛部署于手机、可穿戴设备、无人机以及车载导航等各类终端,具有较好的生态基础。AiNET团队致力于为数字孪生等新兴应用落地提供可参考雏形,分析当前的需求与瓶颈,在运动感知领域深入探索,取得了两项阶段性成果。
成果一:基于无角速度计算加速度计阵列的轨迹重建方法
轨迹重建是运动感知技术的主要研究方向之一。典型的主流方案中惯性轨迹重建系统同时搭载陀螺仪与加速度计,分别测量运动物体的角速度与加速度,再通过对角速度与加速度进行积分,可得到运动物体的姿态、速度以及轨迹点。为更适应低功耗场景,另一方案将相对功耗较高的陀螺仪替换为低功耗加速度计的阵列,利用加速度计阵列计算所需角速度,再进行后续轨迹重建。然而,该方案在降低功耗的同时却引入了额外的角速度计算,导致系统的累积误差增大。
针对传统方法存在的问题,本项工作创新性地提出了无角速度计算的加速度计阵列方案,在保证系统低功耗的同时,降低了系统的累积误差。所提出的算法利用加速度计阵列内的空间几何约束,构建轨迹重建优化问题对最优轨迹点进行求解。本项工作求得了该优化问题的闭式解,大大降低算法的计算复杂度。在实际二维场景的物理实验中,与传统的两种方法相比,所提出的算法具有更高的轨迹重建精度、更低的功耗、更高的可扩展性以及更强的鲁棒性。这些结果表明所提方案相比传统方案更符合新兴应用的需求,非常具有继续深入研究的价值。图1给出了本项工作的物理实验平台,图2给出了各方案的轨迹重建误差对比,图3给出了各方案的累积误差对比。
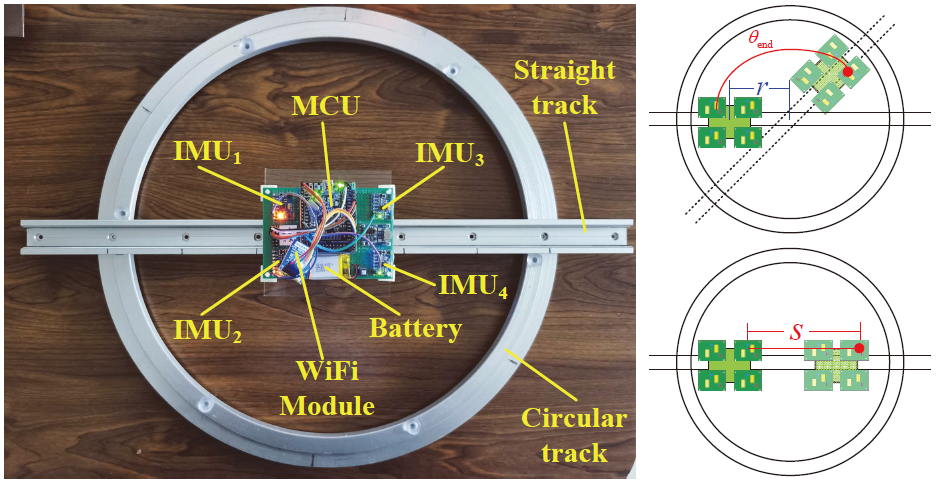
图1 无角速度计算加速度计阵列的物理实验平台
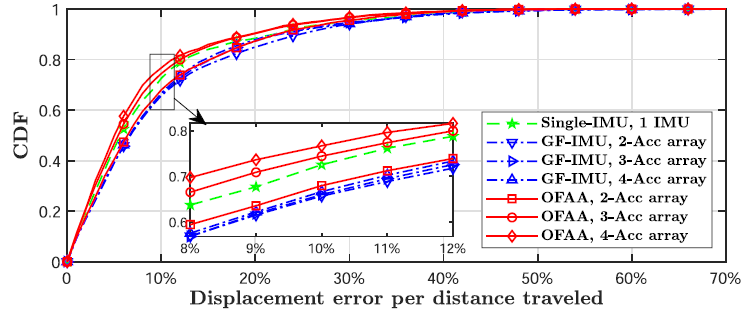
图2 各方案的轨迹重建误差CDF图
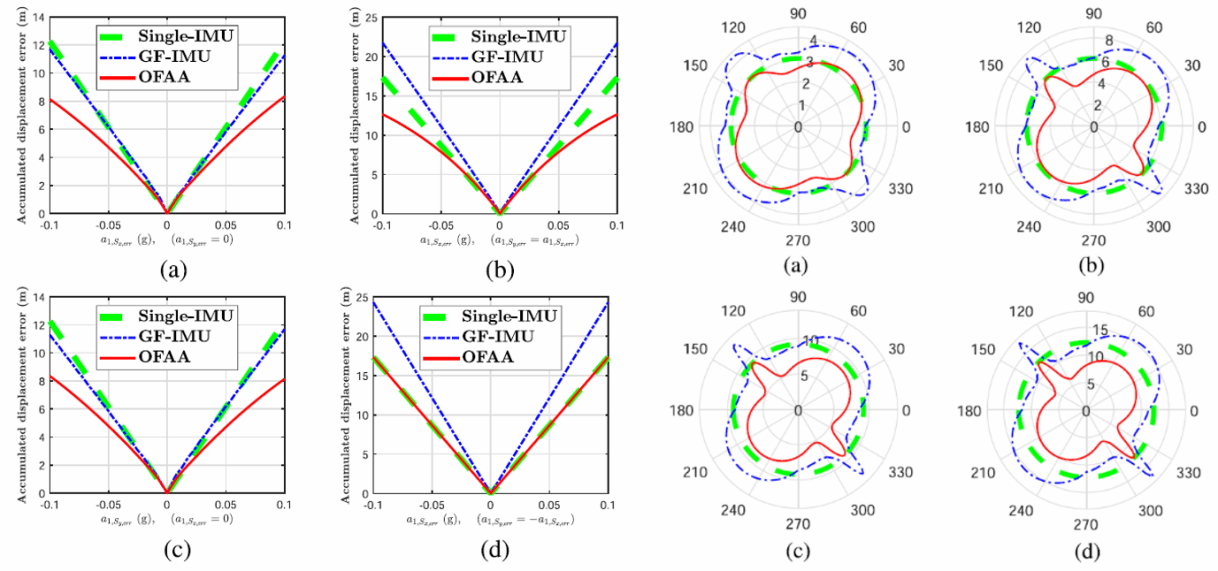
图3 各方案的误差累积对比图
该项工作以学术论文的形式发表于校定T类二级权威学术期刊IEEE Transactions on Industrial Electronics,论文信息为Liu X, Zhou Q, Wu J, et al. An ω-Free Accelerometer Array Method for 2-D Trajectory Reconstruction[J]. IEEE Transactions on Industrial Electronics, 2024, 71(1): 890 - 900. (IF: 7.7, 中科院1区Top)
成果二:基于时间反演的轨迹校正
实际场景中加速度计与陀螺仪并不理想,测量存在误差,而惯性轨迹重建方法中的积分运算对测量误差有累积作用,这将导致轨迹重建结果的可信度随时间降低,直至不可接受的程度。针对此问题,工程上一般假定误差是线性增长,并基于此对轨迹进行后处理校正。事实上,误差累积过程是更复杂的非线性过程,传统方案中线性增长的假定比较粗糙,且没有系统完整的理论分析。
轨迹后处理校正是提升轨迹重建精度的有效手段,但系统分析的研究较少。本项工作创新性地引入宏观运动的时间反演对称性,提出基于时间反演的轨迹校正算法。由于轨迹重建结果的可信度随时间降低,那么针对同一段运动,在时间正演下进行计算,可信度将随时间正反向逐渐降低,在时间反演下进行计算,可信度将随时间负方向逐渐降低。此外,时间正反演下同一时刻物体运动的加速度与位置相同,而速度相反。基于这些条件,本项工作提出将时间正演轨迹重建的结果与时间反演轨迹重建的结果融合(图4),实现整条时间轴上轨迹重建结果可信度的提升。相关理论推导已求得问题闭式解。在实际二维场景的物理实验中,时间反演对轨迹精度的提升得到了验证(图5)。
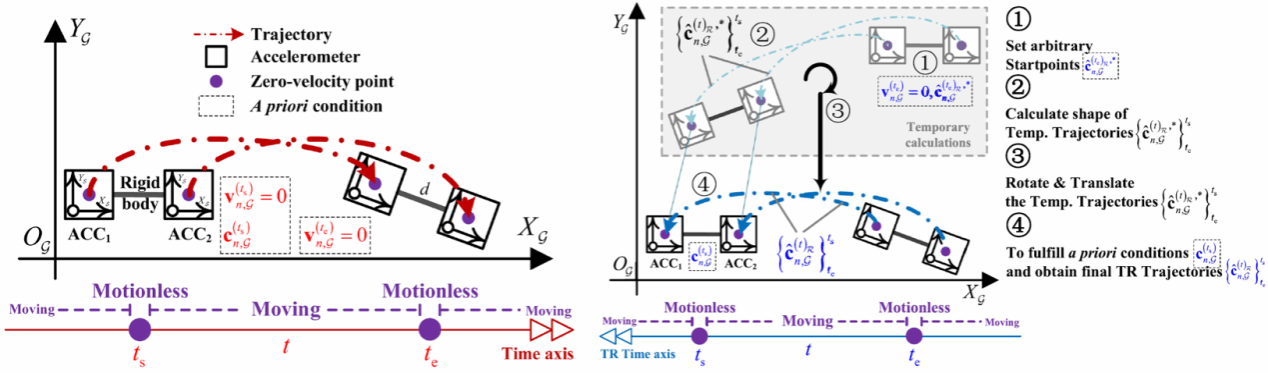
图4 时间正演与时间反演下轨迹重建的示意图
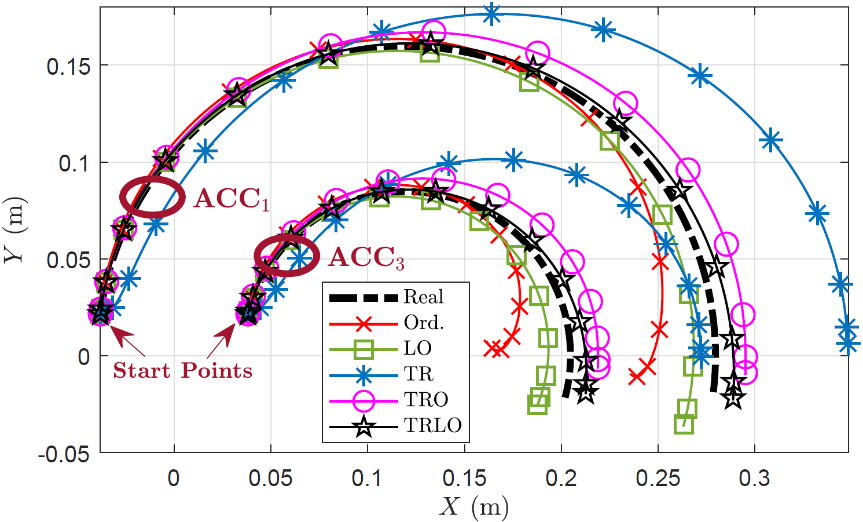
图5 时间反演轨迹校正算法各阶段轨迹重建效果对比图
该项工作以学术论文的形式发表于校定B类学术期刊IEEE Signal Processing Letters,论文信息为Liu X, Zhou Q, Cheng C T, et al. Time-Reversal-Based Correction Algorithms for ω-Free Trajectory Reconstruction Method[J]. IEEE Signal Processing Letters, 2024, 31: 676-680. (IF: 3.9, 中科院2区)
据了解AiNET团队拥有丰富的产学研经验,本文成果一中低功耗感知系统的相关工作即起源于以往刘新宇博士和周清峰教授团队对可穿戴设备的研究。本文成果二中,刘新宇博士引入宏观运动时间反演对称性的想法源于几年前观看诺兰科幻电影《信条(Tenet)》(图6)后的启发,电影中对时间正演与反演的描绘为该项工作提供了灵感,因此在发表的论文成果中也将电影中用于区分时间正反演的红色与蓝色(图6)用于标记时间正反演下的轨迹重建(见图4与图5)。
图6 电影《信条(Tenet)》海报与片中截图
一审:邓敏君 二审:李艳霞 三审:胡耀华
